記事公開日
FSOの標準規格"OCT"について その2

はじめに
今回は衛星などで使われる光無線通信の一つであるFSOにかんする標準規格であるOCTについて書いてみたいと思います。FSOもOCTも、おそらく一般の方には馴染みがない言葉かもしれません。しかし、どちらも今後確実に広まって行くであろう技術であり、今後の携帯電話とかにも影響を与えるであろう技術でもあります。
今回は、光無線通信のブログらしく(?)今最も注目されている光無線通信技術である、FSOやOCTの技術的な説明をしたいと思います。そこそこのボリュームとなるため、3回に分けて書いていきます。
第二回である今回は、FSOの肝となる部分である衛星の光の方向の合わせ方、通称PATについて書いていきたいと思います。
SDAの標準規格とは?
ここからは、SDAによる標準規格”OCT”の中身を見ていきます。
まず、最初に注意点を一つ。OCTの規格の最新版はバージョン4.0なのですが、OCTが最初に世の中へ広まったのがバージョン3.0だったため、OCTの規格はこの二つを分けて考えられる場合多い、というこを注意しておく必要があります。この記事でもバージョン4.0だけで規定されている内容は、極力「バージョン4.0の内容である」ことを提示するようにします。
さて、OCTは携帯電話(3GPP)の様にOSIレイヤーの上位まで規定されてはおらず、下位レイヤー(レイヤー1、2)のみ規定されています。そして、変調やパケットにそこまで特別な特徴があるわけではありません。OCTの大きな特徴はPAT方式の規定でしょう。
PATとは?
前回述べたとおり、FSOはレーザーによる光無線通信を指します。レーザーはその特性から、普通の光(電灯とかLEDの光)と比べてもの凄く遠くまでその光を飛ばすことができます。懐中電灯とレーザーポインターを思い浮かべて頂ければ、両者の違いをイメージできるかと思います。レーザーは、光を遠くまで飛ばすために光を極限まで細くしてエネルギーを集中させています。ですから、光の届いた先は「点」になります。
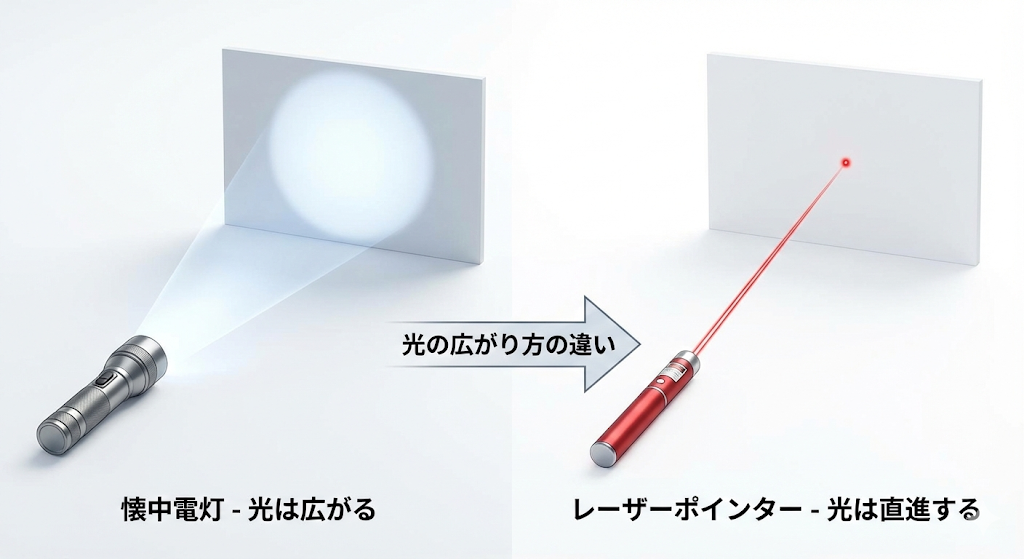
懐中電灯とレーザーポインターの違い
Google Gemini作成
レーザーによる光無線通信で通信相手と接続する場合、先ずは通信相手先にその「点」をあてなければ、光そのものが届きません。光が届かなければ、通信どころか相手の存在すら認識できません。しかし、その「点」を相手に当てるのは非常に難しい作業です。なぜなら、衛星同士が通信する場合、通信相手の衛星は数千キロ、数万キロ先にいるはずだからです。例えば、沖縄から札幌までがおよそ2300キロメートルです。沖縄から、札幌の時計台にレーザーポインター当てられますか?人力では無理ですよね?しかし、FSOではそれ以上の距離でレーザーポインターを当てなければならないって話ですから、どれだけ難しい話か分かって頂けると思います。
もちろん、いくら光を絞ったとはいえ、数千キロ先まで行けば光の直径は数十メートルにはなります。これが大きいのか小さいのかわかりにくいと思うので、我々の製品である「LEDバックホール」で比較してみます。LEDバックホールは100mでおよそ直径1mに光が広がります。FSOの場合、100mだと直径3mm以下が普通です。LEDバックホールだって光無線通信機ですから、照明とか懐中電灯とは比べものにならないぐらいレンズで光を絞っていますが、それでもLED等の普通の光とレーザーの光では光の”広がらなさ”においても桁違いな差があって、これもPATの困難さの一因となっています。
さて、本題に戻ります。PATはPointing, Acquisition, and Trackingの略です。つまり、PATとは、相手の方向を向いて、捕捉して、相手に自分の光を当て続ける、ということです。先ほど書いた通り、100mで3mmにしか広がらない細い光を5000km先の相手にどう当てるのか、OCT規格ではその手順が決められています。折角なので、今回はその中身について触れていきたいと思います。
PATの手順
OCTのPATの最大の特徴は、「お互いが通信せずに」行われると言うことです。相手を探すための別の信号(例えば電波信号)も使いません。だから、PATの途中に「光が届いた」という返事を送ることができません。ただ一つ、お互いの「時間同期」だけはとり、それを命綱にします。だから、双方のPATプロセスの開始時間だけはぴったりと合わせます。
尚、衛星には"リード”と”フォロー”というPAT中の役割が与えら、それぞれのプロセス(動作)の順番が決まっています。規格内では、これを「リード・アンド・フォロー(Lead and Follow)戦略」と呼んでいるようです。いわゆる、ネットワーク機器におけるマスター/エンドポイント(スレーブ)という関係と同じです。
リードとフォローはお互い通信していませんが、双方とも絶対時間に同期している正確な(厳密な)クロックを持たなければなりません。これからPATの具体的手順を説明していきますが、お互いが各プロセスの開始時間、終了時間を正確に把握していないと、PATは機能しないということを覚えて置いてください。
具体的なPATのプロセスは次のようになります。
-
セットアップ 相手と通信しないとは言え、流石に相手の衛星がどこの誰かも分からず、位置や軌道すら全く分からない状態からPATを行うのは無理なので、地上からの情報により接続相手の情報、および位置と軌道を貰います。これにより、衛星は相手の位置(予測軌道)を計算し、そのおおよその方向にポインタを向けます(ポインティング)。そして、何より大切なPATプロセスの「開始時間(の絶対時間)」も合わせます。
-
捕捉フェーズ 1A PATの具体的なプロセスのスタートです。「開始時間」が来ると、まず最初にリード側がレーザー光を出しスキャンします。そして、フォロー側がその光の受信を試みます。光のスキャンは、不確実性コーンの範囲内を、スパイラルスキャン(渦巻き状の走査)することによって行われます。不確実性コーンとスパイラルスキャンはPATの特徴とも言えるワードなので、少し詳しく説明します。
- 不確実性コーン(Uncertainty Cone)とは、スキャンする衛星(リード)が、相手の衛星(フォロー)がいると予測している3次元の範囲を指します。相手の衛星をスキャンする範囲とも言えるでしょう。ただ、光のスキャン自体は2次元の「円」で行われるため、スキャン範囲を三次元にすると円錐形になります。円錐はパラメータにてその大きさ(角度)があらかじめ決まっています。角度を広くするほど大きな範囲をスキャンできますが、相手を捕捉するまでの時間は長くなります。
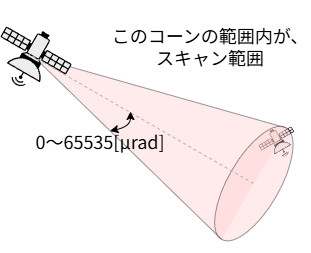
不確実性コーン- スパイラススキャンは、不確実性コーンの範囲を「渦巻き」状に”スキャン”、すなわち光を出していきます。相手はその光を受信します。渦巻きの幅は送信光のビームの幅よりも狭くするため、不確実性コーンの範囲を中心から抜けなく光をスキャンすることを目的としています。また、このスパイラルスキャンの速度も間隔もパラメータにより決まっていて、リード、フォロー双方が共有しています。これは後述のポインティング精度向上に使用するためです。
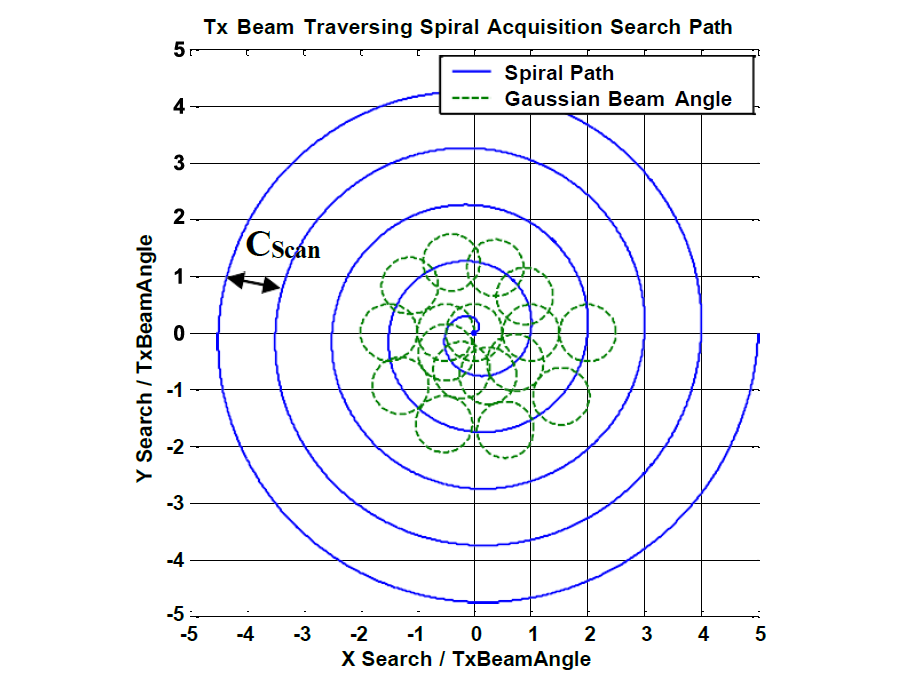
spiralスキャン
SDA OCT Standard v4.0よりこの捕捉フェーズ 1Aでリードから送信される光は、40kHzまたは50kHzのトラッキングトーンと呼ばれるAM(振幅変調)の信号です。情報が載っているわけではありませんが、フォローがスキャンの光であることが認識できるようになっています。
この段階で、フォローがリードの出したスキャンの光を受信出来たかどうかをリードが知ることはできません。したがって、スキャンはスパイラルスキャンが完全に終了するまで、すなわちタイムアウトになるまで続けられます。
フォローはスパイラルスキャンの光が受信出来たときは、捕捉フェーズ 1Aの開始時刻からの経過時間により、リードのビームの送信角度を推測し、自身(フォロー)の角度を調整します。衛星の時計や時間同期が不正確の場合、この開始時間からの経過時間と実際の角度が合わず、スキャンによって角度を合わせることができません。したがって、最初に述べたとおり、PATにおいて正確な時間は何より重要なのです。
-
捕捉フェーズ 1B
捕捉フェーズ 1Aで、フォローがスキャンの光を受信できたかどうかにかかわらず、リード側は捕捉フェーズ 1Aが終了すると、捕捉フェーズ 1Bに移行し、リードは受信に回ります。
今度はフォローがスパイラルスキャンを実施します。捕捉フェーズ 1Aにてリードのスキャン光を受信出来ている場合、リードの方角とスパイラルスキャンの中心が近くなっている可能性があります。その場合、フォローの不確実性コーンは小さくなり、スパイラルスキャンの範囲が狭くなります。
-
捕捉フェーズ 2
このフェーズでは、捕捉フェーズ 1Aと1Bを繰り返します。互いにスキャンのビームが受信出来ていれば、徐々に不確実性コーンが小さくなっていきます。この段階でもお互いが通信しているわけではないため、どの程度正確に相手を捉えたかどうかにかかわらず、タイムアウトまでスキャンが繰り返されます。
想定通りであれば、この捕捉フェーズ 2がタイムアウトする前に、リードもフォローも、お互いのビーム方向は、相手の捕捉センサーの受信可能角度(視野角、FOV: Field Of View)に入っているはずです。つまり、連続してビームが捕捉できている状態になっているということです。その場合は、次のフェーズに向かいます。(具体的条件、方法は機器依存)
一方、捕捉フェーズ 2がタイムアウトするまでにFOV内に互いの角度を集束できない、それどころかビームの捕捉すらできていないという場合、「準備」フェーズという別のフェーズに移行し、捕捉フェーズ 1Aからやり直しとなります。
-
精密捕捉
捕捉フェーズ 2が終了すると、精密捕捉(Fine Acquisition)に入ります。このフェーズでは、リード、フォローともお互いのFOVに入っているという状態なので、後は完全に微調整するだけです。しかし、この時点でもリード、フォローとも通信しているわけではないため、やることは捕捉フェーズ 1や2と変わりません。不確実性コーンの中をスパイラルスキャンするだけです。尚、この状態にくると、スキャン用のビームは、より低い変調度(受信しにくいが高速)のものが使われます。
-
通信
機密捕捉のフェーズでタイムアウトがくると、リードとフォローは初めて通信を試みます。通信に成功したら次のフェーズに移ります。残念ながら通信に失敗した場合は、精密捕捉に戻ります。
通信が開始されると、その後はお互いがやり取りしつつ光の角度をリアルタイムで微調整するようなフェーズに移ります。言い換えると、ここで、お互いを探すのではなく、相手を「追尾」する状態になるというわけです。
尚、この状態であればずっと通信が維持されるはずですが、もし通信状態の間に何らかの理由で通信が途絶えた場合は、やはり精密捕捉のフェーズに戻ることになっています。
PATの具体的な手順は以上の通りです。最後の「通信」に入るまで、リードとフォローは一切の通信をしていません。そのため、全てのフェーズにおいて「タイムアウト」が基準で次のフェーズへ遷移していきます。そして、フェーズとか難しそうに聞こえますが、実際の中身はスパイラルスキャンを交互に行っているだけとも言えます。
尚、PATは全ての工程を100秒以内に終えなければいけないというルールもあります。個人的には、これは非常に短い時間だと思っています。私がこの規格を初めて読んだときは、スパイラルスキャンは結構ゆっくりじっくりやるものだと思っていました。しかし、100秒以内となると、スパイラルスキャンの回数をこなすにはスキャンをかなり高速に実施する必要があります。だから、実際の動作を見れば(いや、宇宙なので実際に見ることはできませんが)、結構キビキビ動いているのであろうと想像ができます。
まとめと次回予告
いかがだったでしょうか?PATのキモは時間同期とスパイラルスキャンです。お互いが通信しない中で、唯一信頼できるのが時間。「この時間に光が届くはずだ」だけで動いているといっても過言ではありません。このPATですが、我々の製品であるLEDバックホールでも必要な工程です。でも、LEDバックホールでは、現在のところ光の方向は「人力」で調整しています。OCTと同じ方法でPATを自動化すれば良いと思われるでしょうが、この方法は非常に高価で正確な時計を積んでいることが前提の人工衛星ならではという部分もあり、我々が扱うような地上における光無線通信のPATにはちょっと流用しがたいんですよね。
次回、第3回はOCTの光の特徴や、物理層などを説明しつつ、他の光無線通信との比較などをしたいと思います。それでは次回もお楽しみに。