

LED通信事業プロジェクト エンジニアブログ
ジョイント機能を用いて設計したショベルカー型ラジコン完成編
記事更新日 2023年6月13日
はじめに
過去2回に渡って、Fusion360のジョイント機能を用いて可動する部品について記しました。
ジョイントを用いた連動可動 (ダミー油圧シリンダー)
ジョイント機能を用いて設計した部品の造形と可動部の確認
これらの部品を別途開発中だった車体に組み込み、ショベルカーとして完成形になりましたので、最終回としてブログを記します。
ショベルカー型ラジコン全体
早速ですが、過去2回の記事で開発を進めてきたショベルカーのアーム部分を車体側と合体した姿が以下の図の内容となります。
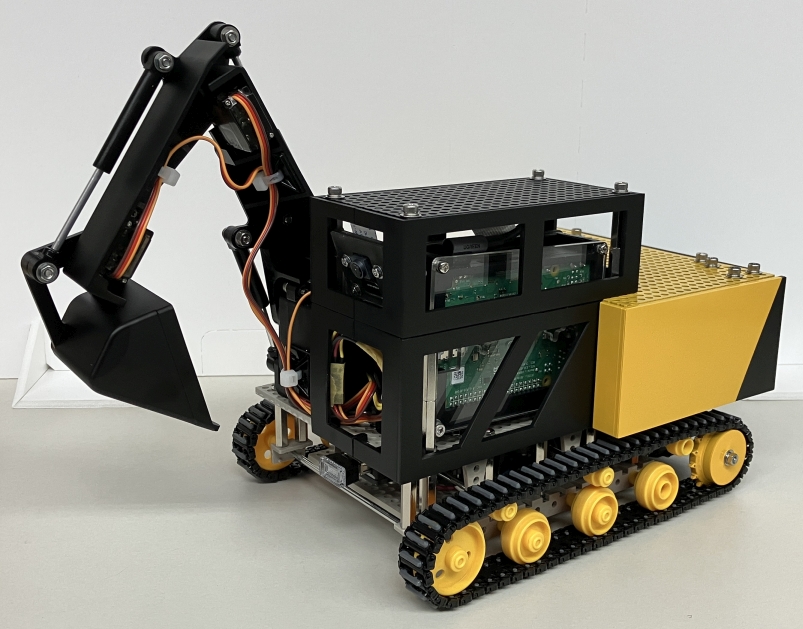
図1:ショベルカー全体 前

図2:ショベルカー全体 後
車体側にはRaspberry Pi 4を搭載しており、Ether経由でPCから操作信号を送ることで遠隔操作が可能です。
開発段階ではラズパイとPCをLANケーブルで直結して操作しています。今後、作製を依頼してきた弊社名古屋営業所の担当者の元で、本体EtherポートにLocal5G端末を合体させる予定です。これにより、Local5Gの電波を用いて遠隔操縦する重機をイメージさせるラジコンとなります。
完成形に向けてアーム再造形
前回記事のブーム・アーム・バケットで完成形まで仕上げる予定でしたが、小型サーボモーターを採用した関係で、重量過多による動作不良が起きたため、肉薄化やリブ削除を含めた全体的なシェイプアップを行いました。
また、ブーム基部の小型モーターは完全にパワー不足で、指で初速を与えないと動作できないことが判明したため、ブルドーザー型でも使用した大型ハイパワーなサーボモーターに変更しました。ブームを大型サーボモーターに対応させる形状変更を行った際、おまけとしてブームと車体間にダミー油圧シリンダーを追加したので、結果として見た目をさらに盛ることが出来たかと思います。
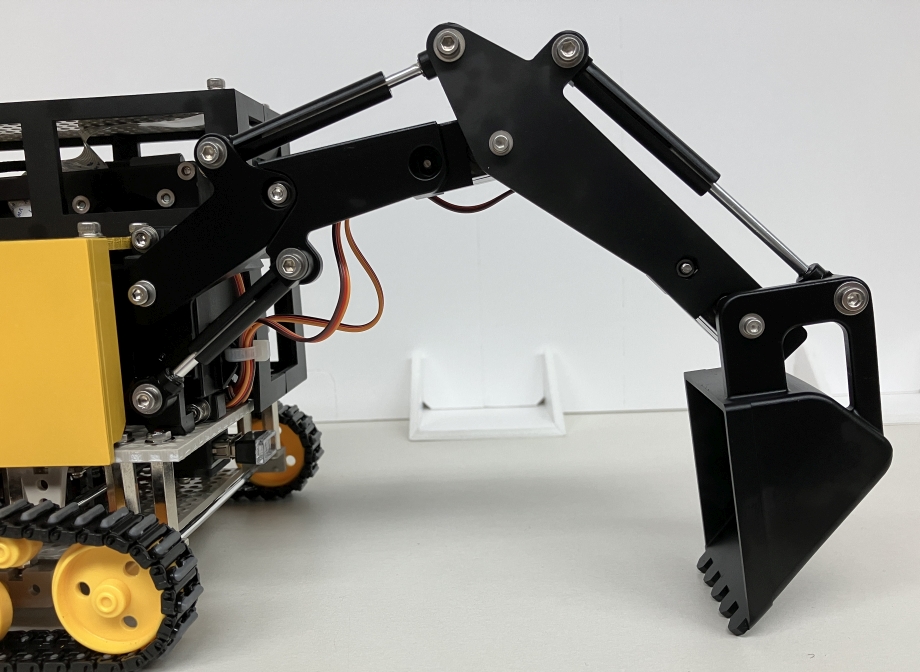
図3:完成形のブーム・アーム・バケット
サーボモーターによるアーム各関節の可動について、ブームは0~45度、アーム・バケットは0~90度の角度で動かすことが可能です。
最終調整前のブームは0~75度と追加で30度下に向けることができたのですが、予期しないエラーで起動時に可動範囲の最大値までアームを勢いよく振ってしまう現象が極々稀に発生したので、エラーが発生しても自己破壊に至らない程度まで可動範囲を狭くするように設定しました。レスキューロボットのような使い方をするわけではないですし、開発者の手を離れて運用することになるので、機能よりも信頼性・安定性重視です。
また、開発中はダミー油圧シリンダーの渋さが課題でしたが、可動部へシリコーンオイル注油や手動での擦り合わせをして引っかかりを抑えてあります。自己破壊防止策のひとつとして動作速度を落としてあるので、滑らかさは犠牲になっていますがやむ無しです。
図4:アーム動作の様子
操作系
過去に開発したブルドーザー型ラジコン (光造形3Dプリンター 事例紹介) と今回のショベルカー型ラジコンのアップデート内容として、操作方法を一新しました。
以前のものはPCのキーボード入力を元に、WASDで前進・後退・左右超信地旋回、RFでドーザーブレードの上下動作をしていました。
今回のものはWindowsのゲームコントローラー入力方式のX-Inputに対応するように操作用ツールを更新し、コントローラーの左右スティックのアナログ入力値を元に、各履帯の回転方向と速度を調整できるようになりました。左右スティックを同方向に同量倒すと前進・後退、同方向でも倒す量が異なると緩やかに旋回、左右逆方向に倒すと超信地旋回することが可能です。
4スティックのゲームコントローラーがあれば、実際のショベルカーのJIS操作系を完全再現できたのですが、さすがにそのような製品は見当たらなかったので、アーム関係は十字・ABXYボタンに振っています。スティックではなくボタン操作が原因なのか、はたまた慣れの問題なのか、アームの3つの間接を左右の手で操作することになるので、意図した通りに動かすのはなかなか難しいです。前章のアーム動作の様子を撮影するにあたって、操作練習が必要でした。それでも若干ぎこちない動作ですが……

図5:コントローラー操作方法
また、電気的にはフロントにUSB LEDライトや、万が一の暴走に備えてキルスイッチを追加して、見栄えや安全性の向上を図っています。車体主要部は既製品のユニバーサルプレートを活用したカクカクの豆腐建築ですが、主な利用場所が展示会やお客様への提案と聞いていますので、目立つアーム類の造形には注力しました。
見えない箇所ではありますが、ラズパイを実機で言う運転席部分に配置した関係で、電源であるモバイルバッテリーが車体右側に若干寄せて内蔵されています。バランス調整のために、車体左側のパネル裏面に鉛シートをカウンターウェイトとして貼り付ける小細工がしてあったりします。
図6:車体動作の様子
まとめ
以上、ジョイント機能を用いて設計した、ショベルカー型ラジコンの完成編でした。
「ブルドーザー型の開発内容を流用してショベルカー型を開発してほしい」との要望で設計・製造しましたが、新機能を実装したおかげで新規開発した場合と同等の時間が掛かってしまいましたので、少し反省です。
しかし、操作用ツール側をX-Input対応にできたことは大きな収穫で、そのうちブルドーザー側の操作系も更新したいところです。
