

LED Backhaul Project Engineer Blog
"Light Communication" supporting electronic traction
Last Update: Jul 27th, 2021
What is "Electronic Traction"?
When a vehicle pulls another vehicle to travel, it is called towing. Well-known towing vehicles include trailers, campers seen overseas, and pickup trucks towing boards, but anything else that is connected and pulled by the lead vehicle can be called a towing vehicle. For example, an electric locomotive pulling a passenger car, or a military vehicle pulling an anti-aircraft missile are also towing vehicles. However, all traction vehicles are physically "pulled" by couplers, connecting bars, and chains. So what does "Electronic Traction" mean? It's actually a new term that was recently coined. "Electronic Traction" is when the cars are not physically connected to each other, but electrically connected, so that the car behind runs as if it is being pulled by the lead car. The first time this technology was used was in something called "Truck Platooning".
In truck platooning, the lead vehicle is a truck driven by a driver, but the following trucks are unmanned and follow the lead vehicle as if they are being towed by the lead vehicle. In other words, one manned truck drives in a convoy with several unmanned trucks (Fig. 1). The main difference between ACC and truck platooning is the "space between vehicles": ACC requires sufficient space between vehicles to avoid colliding with the vehicle in front, even when the vehicle in front stops suddenly. In general, the distance between two vehicles should be measured in meters per hour (e.g., 80 meters if the vehicle is traveling at 80 km/h). However, in truck platooning, the distance between vehicles is less than 10 meters even on highways. The reason for this is to prevent other vehicles from cutting in between the trucks and to improve the fuel efficiency of the following vehicles by reducing air resistance, but with a distance of only 10 meters, if a vehicle in front of you brakes suddenly, you will collide with it under normal ACC conditions. (Of course, even if a human driver is driving, a collision will occur. This is because ACC only uses sensors to supplement the movement of the vehicle in front, so it needs a certain amount of time to determine that the vehicle in front has "suddenly" braked, and a 10-meter distance is too short to determine this. In truck platooning, on the other hand, the vehicle in front and the vehicle behind are in constant communication, sharing information on braking and accelerating, and the system allows the vehicle behind to act in accordance with the behavior of the vehicle in front. For example, if the vehicle in front brakes suddenly, the following vehicle can also brake suddenly at almost the same time, thus avoiding a collision even with a short distance between vehicles. The following vehicle in a truck platooning is driven by so-called "inter-vehicle communication". In addition to the normal ACC capability (tracking by various sensors), the system in which the front and rear vehicles follow each other in cooperation through inter-vehicle communication is called Cooperative ACC (CACC).

fig.1 Truck Platooning
Another major difference between truck platooning and ACC is that ACC is supposed to be "unmanned driving," which is a type of ACC, but at Level 4[^2] in the scope of automated driving. In normal Level 4 driving, the car is responsible for all the decisions and operations, which makes it difficult not only from a technical standpoint, but also from a legal standpoint of who is responsible, and from a social standpoint of who should be covered in the event of an accident. However, the legal and social aspects of CACC truck platooning are not so difficult, considering the fact that even though the truck is unmanned, it performs the same actions as the vehicle in front of it in principle, and that it is under the control of the manned lead vehicle, meaning that the driver of the lead vehicle is clearly responsible for driving. In Japan, the legal treatment of truck platooning has already been decided, and that is to "treat truck platooning (CACC) as a type of "towing" rather than "automatic driving" to allow unmanned driving (although strictly speaking it is not driving since it is towing) "That's what I mean. And since it's named towing but not physically pulled, we're going to call it electronic traction in a new way.
It is a truck platooning, but the following vehicle being electronically towed has the same engine and brakes as a normal truck, so it can be used as a normal truck with a driver. So, for example, a truck terminal in Nagoya could be (electronically) connected to a truck terminal in Tokyo, and the vehicles would travel in a convoy on the expressway to the Tokyo terminal, and from the Tokyo terminal, each vehicle would be driven by its own driver to its respective destination (Fig. 2). Since truck driving in convoys using electronic traction is expected to be put to practical use earlier than Level 4 automated driving, it is expected to be a countermeasure to the looming aging of long-distance drivers and the shortage of qualified drivers.
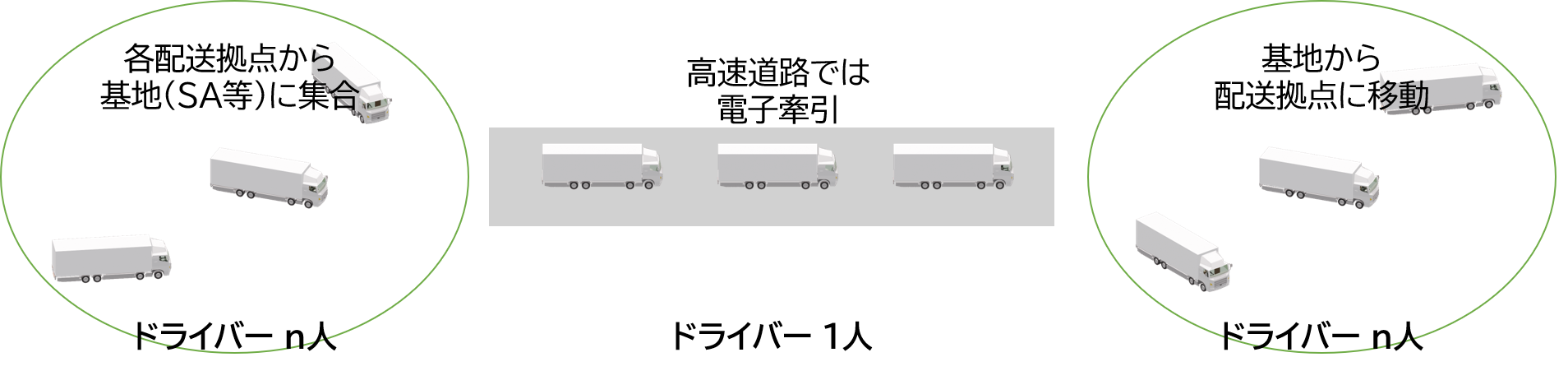
fig.2 How truck platooning is used
What is the technology required for electronic traction?
Although electronic traction is a technology created by truck platooning, it is expected to be used for a variety of other applications in the future. For example, bus convoys for commuting to and from work, and convoys of freight cars at factories, warehouses, and ports. As in the case of truck convoys, the objective is to have the vehicles follow each other unmanned, so it is necessary to use inter-vehicle communication to continuously transmit information on the operation of the lead vehicle to the following vehicles behind. Although the information exchanged by electronic traction is a variety of vehicle information such as gas pedal and brake, it is very small compared to images and videos. For example, even if you transmit 1000Byte of information at 100Hz, it will not reach even 1Mbps. 1Mbps is not a difficult speed to achieve with today's broadband wireless communication technology (such as LTE), but it is a different story when you are constantly using 1Mbps. Sending this data over the cellular network is not an easy task from a cost perspective. Therefore, it is desirable for electronic traction to use its own communication network for inter-vehicle communication if possible.
What should we use for our own communication network? First of all, we need to consider what elements of wireless communication are necessary for inter-vehicle communication in electronic traction. In order to control the following vehicles, information must be sent without interruption, so basically the following three elements will be necessary.
- stability (low error rate)
- low latency
- high resistance to interference
Electronic towing means that we communicate while moving close to the ground. In terms of radio waves, two elements of fading[^3] overlap, so the effects of fading are inevitable. There are many techniques for minimizing the effects of fading. One of the most common ways to prevent the effects of frequency selective fading is to spread the communication over a wide bandwidth. CDMA and OFDM used in cell phones are such technologies, but both use a lot of wideband in radio terms. And even with such methods, there is no way to prevent instantaneous errors due to various types of fading. To minimize the effects of these errors, there are signal processing techniques such as block interliving [^4] and FEC [^5] such as LDPC and polar codes. These are very powerful features and can correct errors that occur in many cases, but they do not prevent all fading effects because the more intense the error correction, the greater the delay.
Since electronic traction is (often) critical to operation and therefore human life, it is generally acceptable to have a fairly low error rate. The former requires increasing the power or gain of the radio, while the latter requires allowing for delay. If you increase the power of the radio too much, it may interfere with the surrounding area, maybe even with the vehicles that follow you, and the system cannot tolerate too much delay. In any case, considerable sacrifices must be made in order to reduce the effects of fading, which can amount to several tens of dB. Another practical way to reduce the final error rate is to use error retransmissions at higher layers, such as TCP, but to reduce the delay, error retransmissions at layers closer to the physical layer, such as Hybrid-ARQ [^6], may be necessary. However, error retransmissions still take time because they are "starting over". In order to keep the delay below the required delay even with error retransmissions, it is necessary to send data many times faster than the required data rate to gain time for retransmissions (Figure 3). This is also explained by Shannon's theorem [^7], which states that if the communication speed is the same, a relatively low error rate and low delay can be achieved if the line to be sent has a high bandwidth (high speed).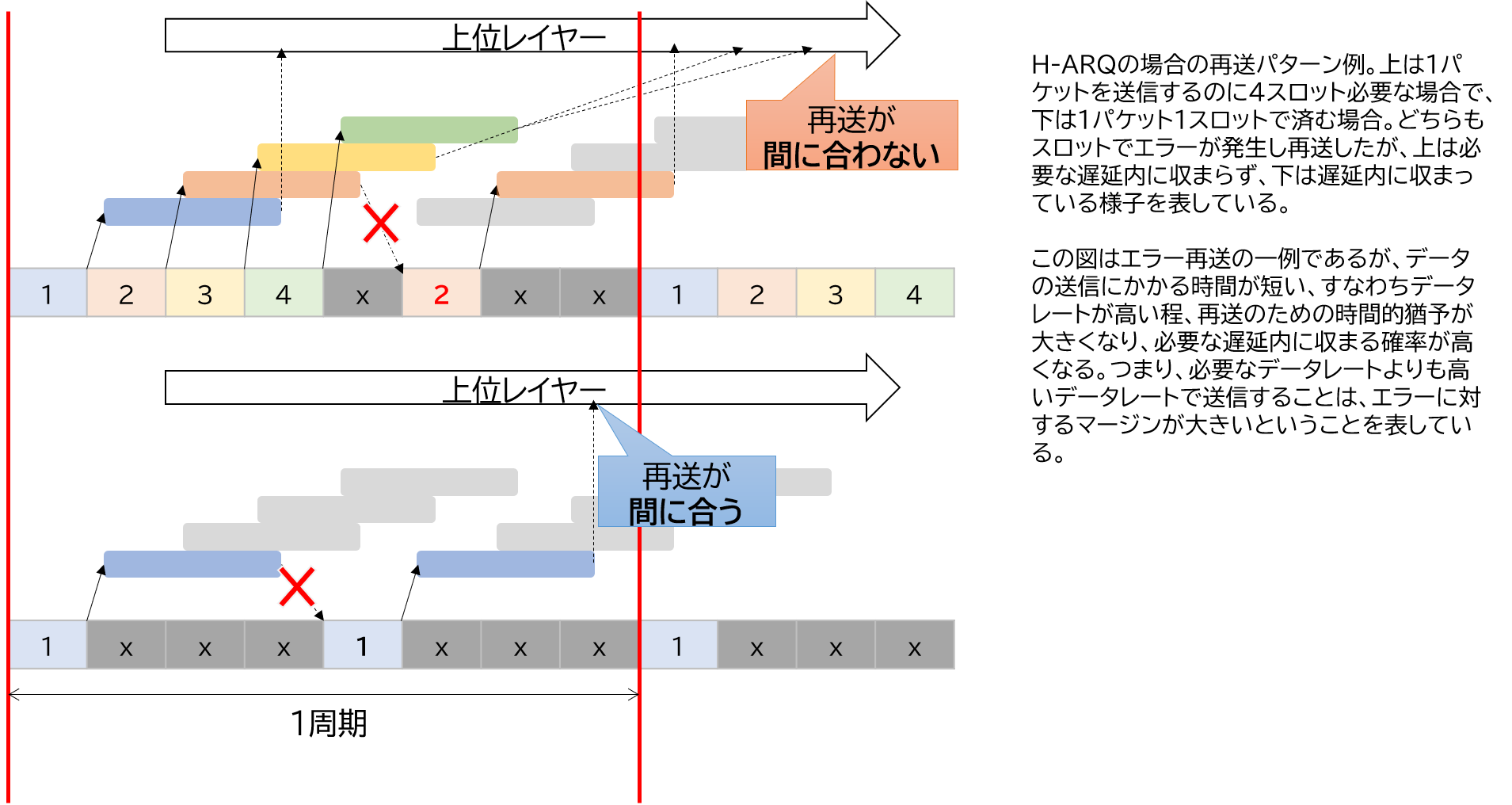
fig.3 Relationship between communication speed and retransmission delay
If we think about it this way, what is desirable in order to satisfy technical elements 1 and 2 for electronic traction is actually "to be able to communicate at a much higher data rate than required in a wide bandwidth. However, unfortunately, there are almost no frequencies that can be "freely used" for electronic traction in this wideband. There are unlicensed bands that don't require a license, but as we all know, 2.4GHz, which is used for Wi-Fi and Bluetooth, sometimes has too many users to communicate properly, and other unlicensed bands that can be used are the same, though not as many as 2.4GHz. It's the same. The relatively free millimeter wave is also starting to be used more and more for cell phone sensors and in-vehicle radar. And the more wideband it uses, the more likely it is to interfere with other communications and radar, resulting in a system with a higher risk of interference. Also, the unlicensed band requires "carrier sense [^8]" under the Radio Law, and that is another factor that increases the delay. After all, the three elements are relatively easy to achieve if you have a frequency license (as in the case of cell phones), but it becomes quite difficult to coexist elements 1, 2 and 3 in the unlicensed band alone.
The reason why optical wireless communication was used
The optical radio communicationLED Backhaul (LEDBH) of the three technical associations is used for inter-vehicle communication for electronic traction in truck platooning. Originally, optical wireless communication was considered as a backup for radio wave communication, but when it was actually used, it successfully solved the problems of radio wave communication, and as the development progressed, it was used as the main communication instead of a backup. Why is that?
Optical wireless communication is characterized by the fact that there is almost no interference from other sources. Light travels in a straight line without spreading too much, and unless there is a mirrored surface, it is greatly attenuated (scattered) when reflected. Although this property makes them susceptible to shielding, they do not generate multipath, which means that fading is unlikely to occur and unintended interference from other devices due to reflection or wraparound is not likely to occur. Small fading effects mean that strong FECs do not have to be applied (especially with small temporal diversity), which means that overall communication delay can be reduced. In addition, since light is not bound by radio laws, carrier sense is not required, which is another factor in reducing delay. Optical communication has almost no interference from other sources, but in terms of "light" itself, it is actually, or rather naturally, an environment with a lot of noise. Sunlight, lighting, and in the case of inter-vehicle communication, headlights and tail lights are also powerful noises. LEDBH uses the DC-OFDM modulation method, which modulates the amplitude of the light using OFDM (Figure 4). In other words, "non-communication" light such as sunlight, illumination, headlights, etc., does not affect the communication to any great extent.
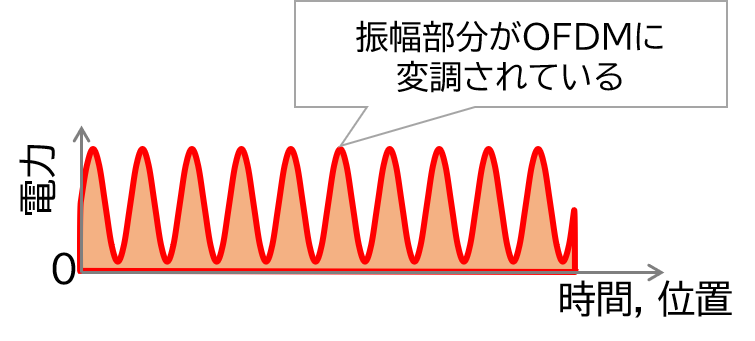
fig.4 DC-OFDM modulation
LEDBH has a maximum speed of 750Mbps (physical layer speed). The communication distance required for electronic traction is about 30 meters at most, so even in poor conditions, we can secure more than 100 Mbps, which is a sufficient speed for electronic traction. By using that extra communication capacity, we can maintain a low error rate and low latency in a mobile environment, as mentioned earlier. In addition, since adaptive modulation is used to change the speed at high speed in response to changes in SNR, it is possible to communicate at a speed appropriate to the situation even in environments where SNR fluctuations are large, such as when moving. As described above,** optical wireless communication, which has various advantages not found in radio waves, plays a central role as an inter-vehicle communication device for electronic traction because it can satisfy all three elements required for electronic traction. **
Lastly
In actual truck platooning driving, not only optical wireless communication but also LTE and 760MHz ITS band wireless communication are used. In order to prevent the "electronic traction" status from being released if communication is interrupted for any reason, a triple line is installed. As long as electronic towing is used on public roads, not just in truck platooning, multiple radio lines, or redundant lines, will always be necessary. If you have read this far, you may be thinking, "Why don't we just use 5G? In fact, the URLLC of 5G will be able to do this. In fact, a 5G URLLC will be able to satisfy the three elements required for electronic traction (if the communication cost can be cleared). However, I believe that it will probably be difficult to perform electronic traction using only 5G. There is another reason for this, besides the need for redundant lines as I mentioned earlier. It is the problem of illegal radio equipment in trucks. Although there has been a crackdown on this problem, there are still cases of illegal radios being caught. Some of those who are caught are using high-powered radios in order to exchange information over a wide area. If other radios are exposed to such illegally high-powered radio waves within a short distance, they may not be able to communicate at all. And this can happen on any frequency as long as you are communicating by radio. In some cases, all radio communication may be lost at the same time. In other words, redundant radio communication lines are not enough to avoid the risk of total line failure in electronic traction. This is actually the reason why optical radio communication was chosen as a backup line for truck platooning driving.
Electronic traction will continue to expand into a variety of applications. It is expected that this "optical wireless communication" will be adopted in many of its communication devices.
[^1]: ACC is generally used in conjunction with Lane Keep Assist (LKA), a lane departure assist system. The term "ACC" in this section means ACC+LKA.
[^2]: Fully automated driving under certain conditions, such as limited to highways. Up to Level 3, a driver is required even if the driving is automated, but from Level 4, a driver is not required.
[^3]: A phenomenon in which multiple reflected or diffracted waves are combined, resulting in an instantaneous strengthening or weakening of the radio wave. It does not become significantly stronger, but when it becomes weaker, it is not uncommon for it to attenuate by a factor of 10,000 (-40 dB). In mobile communications, as the surrounding environment fluctuates, the effects of fading also fluctuate.
[^4]: A technique to distribute signals over time, i.e., to provide temporal diversity. After encoding, the original signal is distributed in time by writing it in a two-dimensional table, swapping the rows and columns. Even if errors that occur for a certain period of time, but not for a long time (burst errors), such as fading, occur, FEC can still be effective because, from the point of view of the original signal, the bits are continuous in time and do not become errors.
[^5]: Abbreviation for Forward Error Correction. LDPC is an error correcting code with performance close to the Shannon limit and is the most commonly used in recent years.
[^6]: A technique for more efficient error retransmission by retransmitting a block with a different content (there are several ways to do this) instead of just retransmitting the block where the error occurred as in simple error retransmission. It is more effective when used in combination with strong FEC.
[^7]: Also called Shannon's channel coding theorem. Also called Shannon's communication channel coding theorem, this theorem proves that there is an upper bound on communication efficiency when the error rate is almost zero, called the Shannon limit. The Shannon limit is a theorem that proves that there is an upper limit to communication efficiency when the error rate is almost zero.
[^8]: In order not to interfere with other communications by interference, there is a mechanism to "measure the signal strength for a certain period of time on the channel before transmission, and transmit only when there is no other communication (or so it seems). This is usually called carrier sense. In unlicensed bands, which do not require a frequency license, this carrier sense is often required.
