

LED通信事業プロジェクト エンジニアブログ
電子牽引を支える「光無線通信」
記事更新日 2021年7月27日
電子牽引とは?
他の車輌を引っ張って走行することを牽引と呼びます。牽引車としてよく知られているのは、すなわちトレーラーとか、海外で見かけるキャンピングカーやボードを牽引するピックアップトラックなどですが、それ以外でも連結して先頭車両が引っ張る形のものであればなんでも牽引車と言えます。例えば、客車を引っ張る電気機関車であったり、対空ミサイルを牽引する軍用車も牽引車です。しかし、いずれの牽引車も連結器や連結バー、チェーンなどにより物理的に「引っ張る」ことで行われているものです。それでは、電子牽引は何のことでしょう?実は最近作り出された新しい言葉です。車輌同士が物理的には繋がっていないけれども、電気的には接続されていて、後ろの車輌はあたかも先頭車両に牽引されているかのように走行することが電子牽引と呼ばれます。この技術が最初に使われたのが、トラック隊列走行というものです。

図1 トラック隊列走行
もう一つのトラック隊列走行とACCの大きな違いは「無人運転」が想定されているということです。ACCの一種でありながら、自動運転の範囲でいうレベル4[2]での走行です。通常のレベル4走行は、あらゆる状況判断や操作を車が行うため、技術面も然る事ながら、誰が責任を持つのかという法律面、事故時に誰が保障するかの社会面でも難しいところがあり、未だその結論は出ておりません。しかし、CACCのトラック隊列走行は、無人ではあっても原則前走車と同じ動作をすること、そして有人である先頭車両の管理下に置かれている、すなわち運転の責任が先頭車のドライバーにある事が明確だということを考えると、法的、社会的な課題はさほど大きくありません。日本においても、すでにトラック隊列走行の法的扱いは決定しており、それは”トラック隊列走行(CACC)を「自動運転」ではなく「牽引」の一種として扱うことで無人運転(牽引なので厳密に言えば運転ではないですが)を許可する”ということです。そして、牽引と名前がついていますが物理的に引っ張られているわけではないため、これを新たに電子牽引と呼ぶことにしました。
トラック隊列走行ですが、電子牽引されている後続車も通常のトラックと同じエンジンとブレーキを積んでいますから、普段はドライバーが乗る普通のトラックとして使用できます。そのため、例えば名古屋にあるトラックターミナルから(電子)連結させて、東京のトラックターミナルまでは高速道路を隊列走行し、東京のトラックターミナルからはそれぞれの車輌にドライバーが乗り各目的地へ走ってゆく、そんな使われ方が想定されています(図2)。電子牽引によるトラック隊列走行は、レベル4自動運転より早く実用化されることが見込まれているため、迫り来る長距離ドライバーの高齢化、なり手不足の対策として期待されています。
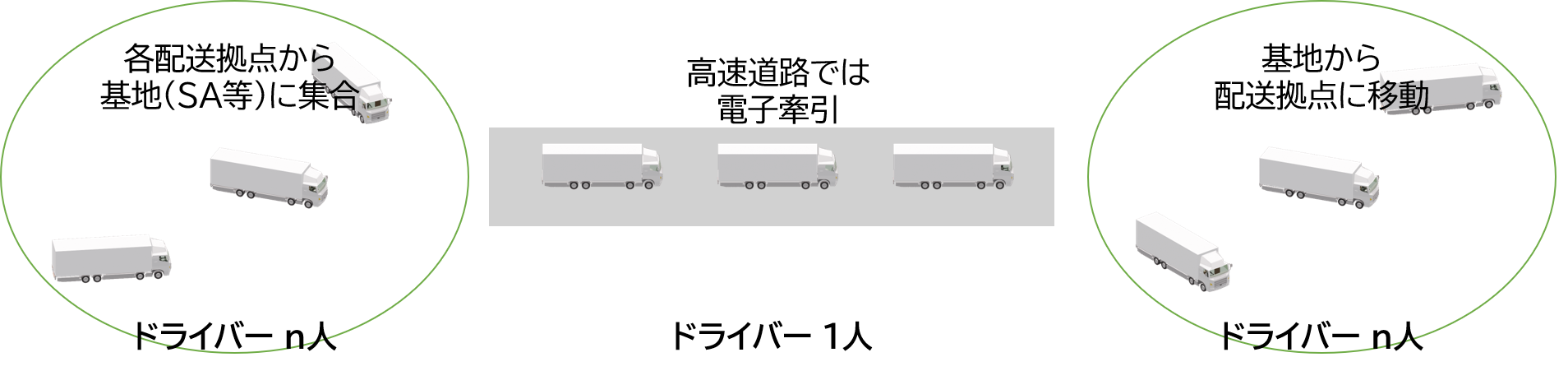
図2 トラック隊列走行の使われ方
電子牽引に必要な技術とは?
電子牽引はトラック隊列走行により生み出された技術ではありますが、将来は様々な別の用途にも転用されることが期待されています。例えば、通勤通学バスの隊列や工場、倉庫、港での貨車の隊列などです。いずれもトラック隊列走行と同じように「無人で追従させる」ことを目的としますので、車車間通信を用いて先頭車両の運転情報を後方の追従車両へ常時送信し続ける必要があります。
電子牽引でやり取りされる情報は、アクセルだったりブレーキだったり様々な車輌情報ではあるものの、画像や動画に比べれば極々小さな情報です。例えば、1回1000Byteの情報を100Hzで送信したとしても、1Mbpsにも届きません。1Mbpsというのは現在の広帯域無線通信技術(例えばLTE等)からすれば難しい速度ではありませんが、常時1Mbpsを「使い続ける」となると話は別です。1Mbpsで1時間通信し続けると450MB、8時間送れば3.6GB。これを携帯電話網で送るとなると、コスト的に容易ではありません。したがって、電子牽引は、できれば自前の通信網で車車間通信を実現するのが望ましいということになります。
自前の通信網には何を使用したら良いでしょうか?まず、電子牽引の車車間通信に必要な無線通信の要素は何か考えます。後続車を制御するには、切れ目無く情報を送り続けなければならないため、基本的には次の3つの要素が必要となるでしょう。
- 安定していること(エラー率が低いこと)
- 遅延が少ないこと
- 干渉に強いこと
電子牽引を行うということは地面に近い場所を移動しながら通信するということです。電波的にいえばフェージング[3]の要素が2つも重なるわけですから、フェージングの影響はどうしても出てしまいます。フェージングの影響を最小限にする技術は多々あります。よくある周波数選択性フェージングの影響を防ぐには通信を広帯域に広げてしまうことが有効です。携帯電話で使われているCDMAやOFDMはそのような技術ですが、どちらも無線的にはかなりの広帯域を使います。そして、そういった方式を使ったとしても様々なフェージングによる瞬間的なエラーの発生は防げません。このエラーの影響を最小限にするために、信号処理技術であるブロックインターリビング[4]とLDPC、ポーラ符号といったFEC[5]が存在します。これらは非常に強力な機能であり多くの場合で発生したエラーを訂正できますが、エラーを訂正する強度を増すほど遅延が大きくなってしまうため、これですべてのフェージングの影響を防げるわけではありません。
電子牽引は運転、すなわち人命に関わる(場合が多い)ため、一般的にかなり低いエラー率しか許容されません。FECを抜けて発生するエラー率を低くするためには、信号品質(SNR)に対して大きなマージンを取るか、FECをより強力にするしかありません。前者は無線の出力か利得を上げる必要があり、後者は遅延を許容する必要があります。無線の出力を上げすぎると周囲、もしかしたら更に自分の後続となる車輌に干渉を与える可能性がありますし、システム上遅延の許容範囲も大きくできません。いずれにしても数十dBにもなるフェージングの影響を小さくするためには相当な犠牲を払う必要があります。
また、最終的なエラー率を低下させる現実的な方法としてはエラー再送があります。TCPのような上位レイヤーでエラー再送を行う方法もありますが、遅延を少なくするためにはHybrid-ARQ[6]のような物理層に近いレイヤーでのエラー再送が必要でしょう。しかし、それでもエラー再送は「やり直し」なので時間がかかります。エラー再送があっても必要な遅延以下にするためには、必要なデータレートより何倍も高速にデータを送信しておき、再送にかかる時間を稼ぐ必要があります(図3)。このことはシャノンの定理[7]でも説明されることですが、同じ通信速度で通信するのであれば、送る回線が広帯域(高速)である方が、相対的に低エラー率、低遅延を実現できるということになります。
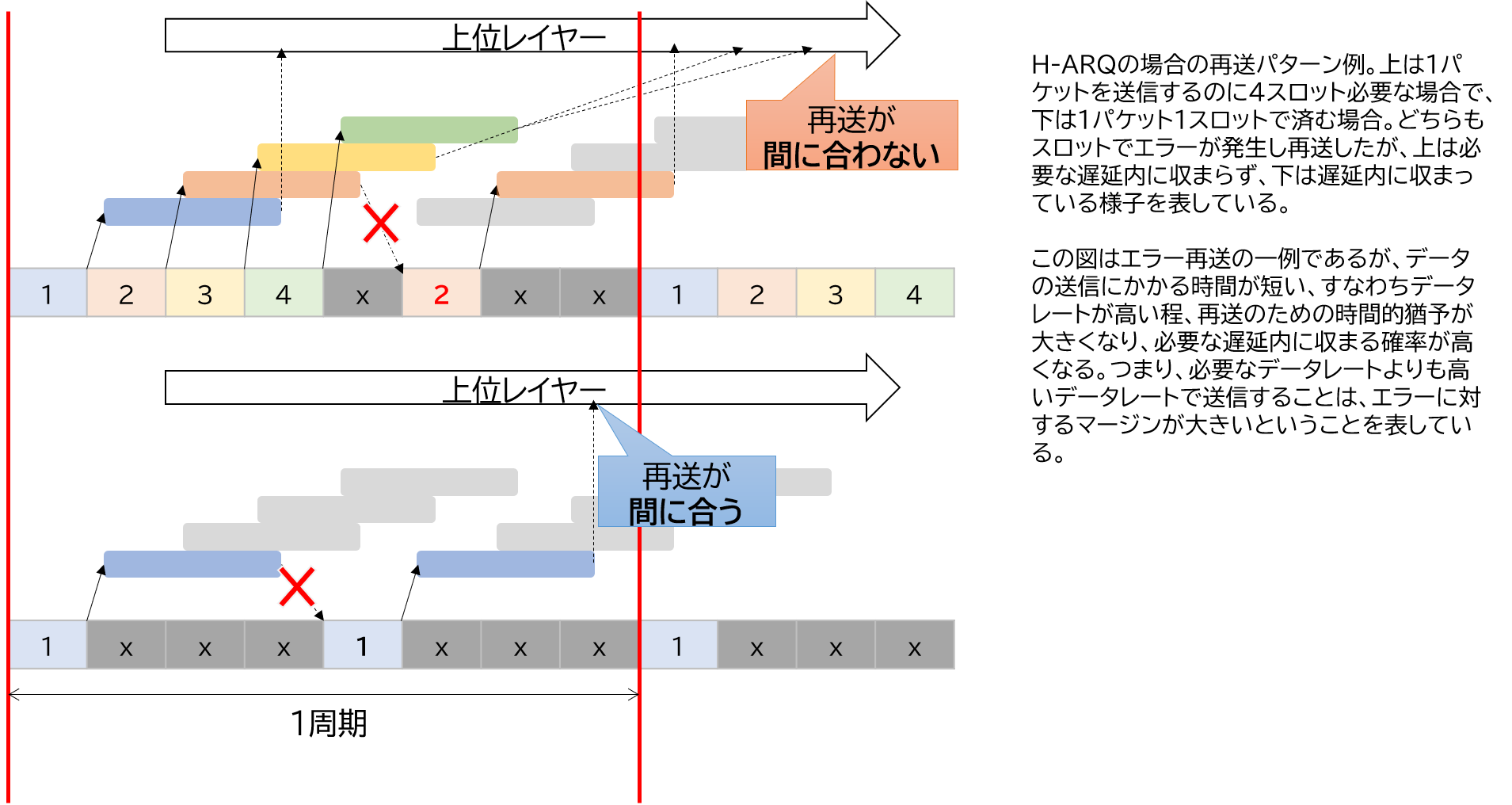
図3 通信速度と再送遅延の関係
この様に考えると、電子牽引に必要な技術的な要素1, 2を満たすために望ましいことは、実は「広帯域で必要なデータレートよりもかなり高速で通信ができるということ」になります。しかし、この広帯域を電子牽引用として「自由に使う」ことができる周波数は、残念ながらほぼありません。アンライセンスバンドどいう免許が要らない周波数帯域はありますが、Wi-FiやBluetoothで使う2.4GHzなどは皆さんご存じの通りユーザーが多すぎてまともに通信できないこともありますし、他の利用できるアンライセンスバンドも2.4GHz程では無いにしろ、同じです。比較的空いていたミリ波も、携帯電話のセンサーや車載レーダーなどでどんどん使われ始めています。そして、使うのが広帯域であればあるほど、他の通信やレーダーと干渉する可能性が高まり、結果として干渉のリスクが高いシステムとなります。また、アンライセンスバンドでは電波法上「キャリアセンス[8]」を求められるため、そこも遅延を大きくする要因となります。結局のところ、「3つの要素は(携帯電話のように)周波数免許さえあれば比較的簡単に実現できるが、アンライセンスバンドだけで1,2の要素と3の要素を共存させるのはなかなかに難くなる」そういう性質のものなのです。
光無線通信が使われた訳
トラック隊列走行の電子牽引用車車間通信には、三技協の光無線通信LED Backhaul (以下LEDBH) が使われています。もともと、電波無線のバックアップとして検討されていた光無線通信ですが、実際に使用してみると電波の通信で困っていたことを見事に解決し、開発が進むにつれてバックアップではなく、メインの通信として使われるようになりました。それはなぜでしょうか?
光無線通信の特長は、他からの干渉が殆ど無い、ということです。光はあまり広がらずに真っ直ぐに進み、鏡面でも無い限り反射すると大きく減衰(散乱)します。この性質によって遮蔽物に弱いという欠点はあるものの、マルチパスが発生しないため、フェージングが起こりにくく、かつ反射や回り込みなどによる意図しない他の機器からの光の干渉も発生しません。フェージングの影響が小さいということは、強いFECをかけなくて済む(特に時間的なダイバーシティが小さくて済む)ため、通信全体として遅延を少なくすることが可能になります。さらに、光は電波法に縛られないためキャリアセンスも必要なく、これも遅延を少なくできる一因です。
他からの干渉が殆ど無い光通信ですが、「光」そのものでいえば、実はというか当然のことですがノイズは多い環境です。太陽光や照明光、車車間通信でいえばヘッドライトやテールランプも強力なノイズです。しかし、これらには対策があります。LEDBHは変調方式としてDC-OFDM方式を採用していて、これは光の振幅をOFDMで変調するという方式です(図4)。OFDM方式のため、振幅が直流や低周波の光は復調の段階でカットされます。つまり、太陽光や照明光、ヘッドライトなどの「非通信」の光は、さほど通信に影響を与えないのです。
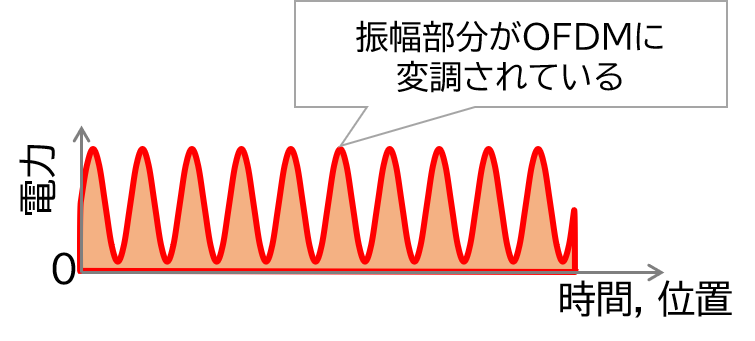
図4 DC-OFDM方式
LEDBHは最大速度が750Mbps(物理層速度)もあります。電子牽引で必要とされる通信距離は長くても30m程度ですから、状況が悪くとも100Mbps以上は確保でき、それは電子牽引としては十分な速度です。その通信余力を使うことで、前述の通り移動環境においてもエラー率が低く、かつ遅延が少ない状態を維持できます。また、SNRの変化に応じて高速に速度を変化させる適応変調を使用していますので、移動時のようにSNRの変動が大きくなる環境おいても状況に合わせた適切な速度で通信することができます。以上のように、電波にはない様々なメリットがある光無線通信は、電子牽引に必要な3つの要素を全て満たすことができるため、電子牽引の車車間通信装置として中心的な役割を果たしています。
最後に
実際のトラック隊列走行では、光無線通信だけでなくLTEや760MHzITS帯の無線通信も使われています。何らかの理由で通信が途切れて「電子牽引」状態が解かれないために、3重の回線を敷いているのです。トラック隊列走行だけでなく、公道で電子牽引を使う限り、複数の無線回線、つまり冗長回線は必ず必要になるでしょう。ここまで読んでくださった方の中には、これは「5Gでやればいいのでは?」とお考えになった方も少なくないと思います。実際、5GのURLLCであれば、(通信コストをクリアできれば)電子牽引に必要な3要素を満たすことができるでしょう。しかし、電子牽引を5Gだけで行うというのはおそらく難しいのではないかと考えます。それには、先ほど書いたとおり冗長回線が必要であること以外にもう一つ理由があります。それは、トラックの違法無線機の問題です。
取り締まりが行われ一時期より減ってきてはいますが、いまだ違法無線機で摘発されるケースが散見されています。摘発される方の中には、かなりの広範囲で情報をやり取りするため、無線機の出力を大幅に上げてらっしゃる方もいます。この様な違法な高出力の電波に、他の無線機が近距離で晒された場合、通信が全くできなくなる場合があります。そして、このことは無線で通信している限りどの周波数でも起こり得ます。場合によっては全ての電波通信が同時にできなくなる可能性もあります。つまり、電子牽引において電波通信による回線を冗長化だけでは回線全断のリスクを回避できないのです。トラック隊列走行のバックアップ回線として光無線通信が選ばれていたのも、実はこの理由からなのです。
電子牽引は、これから様々な用途に広がっていくでしょう。そして、その通信装置の多くに、この「光無線通信」が採用されていくと予想されています。
以上
一般的にACCは、LKA(Lane Keep Assist:車線逸脱防止支援システム)と一緒に用いられる。本項におけるACCとはACC+LKAを意味する。 ↩︎
高速道路限定など一定条件下での完全自動運転。レベル3までは自動であってもドライバーが必要だったが、レベル4からはドライバーはいなくて良い。 ↩︎
複数の反射波や回折波が合成することによって、瞬間的に電波が強くなったり弱くなったりする現象。大幅に強くなることは無いが、弱くなるときは1万分の1(-40dB)に減衰することも珍しくはない。移動体通信においては周りの環境が変動するため、フェージングの影響も変動する。 ↩︎
信号を時間的に分散させる、すなわち時間的なダイバーシティを持たせるための技術。符号化後、2次元のテーブルに書き込んだものを行と列を入れ替えて書き出すことで、元の信号が時間的に分散される。フェージングのように、長くはないが一定時間発生するエラー(バーストエラー)が発生しても、元の信号から見ると時間的に連続したビットでエラーにならないため、FECが効果を発揮できる。 ↩︎
Forward Error Correctionの略。エラー訂正技術のこと。LDPCはシャノン限界に近い性能を持つエラー訂正符号で、近年最もよく使われている。ポーラ符号は5GNRに採用されている、初めてシャノン限界を達成したエラー訂正符号。 ↩︎
単純なエラー再送のようにエラーが起きたブロックをそのまま再送するのではなく、別の内容のブロック(方法はいくつかある)を再送することでより効率的にエラー再送をする技術。強いFECとセットで使うことにより効果が出る。 ↩︎
シャノンの通信路符号化定理とも呼ぶ。シャノン限界とよばれる「エラー率がほぼ0の場合の通信効率の上限」が存在することを証明した定理である。逆に言えば、ある通信を行うにあたり、「通信容量に余裕があればあるほど、通信効率を下げる猶予ができ、結果エラー率をほぼ0にできる」ことになる。 ↩︎
他の通信を干渉により妨害しないため、「送信の前に、送信するチャンネルにおいて一定時間電波強度を測定し、他に通信が行われていない(と思われる)場合にのみ送信する」という仕組みが存在する。これを通常キャリアセンスと呼ぶ。周波数免許不要で使用できるアンライセンスバンドにおいては、このキャリアセンスが必須になっている場合が多い。 ↩︎
